

Making it happen
British Antarctic Survey’s Operations and Logistics team is responsible for getting science teams and their equipment where they need to be — either deep field or onboard ships.
Find out about the work “behind the scenes” to make the ambitious science programme happen.
Ice investigations
The tractor train – overland traverse
The major new platform for the ice investigations is a ‘tractor train’. This consists of two Kässbohrer Pistonbully 300 Polar tractors, two long poly sleds with fuel bladders, and three metal cargo sledges, one of which carries an accommodation caboose.
Tractors

One of the Polar tractors shovelling snow. Photo: Paul Torode.
The tractors, named Polar 1 and Polar 2, tow the fuel, and transport iSTAR C and D personnel and science equipment over the ice. We call this journey a traverse. The tractors have a blade to shovel snow, and are able to tow large loads at reasonable speeds with good fuel efficiency. The total weight towed by the two tractors (including their own weight) during the deployment was 79 tons; the heaviest load towed by one tractor was over 43 tons during part of the voyage! During most of the first deployment season, the speed was 12 km/h.
If all of the science equipment and fuel was moved by aeroplane, it would use 17 times more fuel than a tractor — and if the tractors were to tow more fuel and equipment in the future, this number could be improved further.
Poly sleds

The poly sleds are an innovative new type of sledge mainly for towing fuel. They consist of a 21-m long sheet of high molecular weight (HMW) polyethylene, with metal towing hitches on both ends. This plastic is light, wear-resistant, and much more flexible than metal sledges. The two main poly sleds are dimensioned to carry four fuel bladders, each of which holds 1500 US gallons of fuel — so each weighs almost 20 tonnes when the bladders are full!
A third, shorter, poly sled is used to tow four skidoos behind the tractor train when these are not in use.
Lehmann sledges
The more traditional sledges in the tractor train are steel Lehmann cargo sledges. These are fairly heavy, but solid sledges, and are used to transport fuel barrels, field equipment, and scientific equipment. Additional cargo is also carried on the backs of the tractors themselves.
Accommodation caboose


The accommodation caboose is intended mainly as a shelter, work space, cooking area, and transportation area during the science traverses. It consists of a modified shipping container mounted on one of the Lehmann sledges, and is fitted out with a kitchen, snow melting system, generators, batteries, and communications equipment. While the caboose is a luxurious home for four people during the deployment phase, it will probably get a bit crowded if all twelve personnel are inside during the science traverses. During the science traverses tents will be erected when the tractors are stopped, both for accommodation and for additional working space, if required.
Skidoos
A mainstay of polar travel, skidoos are used for smaller groups working away from the tractors, and to tow some of the geophysics equipment during the traverse. The skidoos that we are using have four-stroke engines, giving better fuel economy, more torque, and lower emissions than past two-stroke models.
Snow Radar
Used in the traverse (iSTAR C and D) the radar uses high frequency waves to penetrate 50-100 m deep into the snowy surface of the glacier. It can detect the fine layers of snow laid over the years, a little like a fuzzy snow-ring picture, and help scientists interpret information gained from other techniques such as ice-core drilling. The shape of the snow can tell scientists something about the rock underlying the glacier.
RRS Ernest Shackleton
The tractor train and all of its fuel were landed in Feb. 2012 on Abbot Ice Shelf from RRS Ernest Shackleton. The Shack, as it is more colloquially known, is predominantly a supply vessel, and was built both to withstand polar conditions and the gruelling offshore conditions in the North Sea. Science work can also be done from this ship, but there is little permanently mounted scientific equipment on board.


The Twin Otter aircraft
BAS operates an air fleet of one de Havilland Dash 7 and four DHC-6 Twin Otters. The Dash-7 is a larger wheeled aeroplane, and is used for the flights between Rothera and the Falkland Islands or Chile. It is also used to move cargo and personnel between Rothera and the logistics camp at Sky Blu, which has an ice runway. However, to get supplies and personnel into the field away from groomed runways, the Twin Otters are used. These aeroplanes have skis as well as wheels, so they can land on the snow. They will be used to take personnel to and from the tractor train both during the deployment and science phases, and will also be used to allow a small team to visit remote rock outcrops (nunataks) to install GPS receivers and take rock samples. These aircraft are a vital part of Antarctic operations to support the iSTAR programme.
The Twin Otter is a high wing, twin engine, turbo-prop aircraft. The version operated by BAS is the wheel/ski equipped aircraft which lands on snow, ice or any other type of hard runways. The Twin Otters are extremely versatile and can be modified to allow airborne surveying and other scientific equipment to be fitted. Remote sensors fitted to the aircraft provide scientists with data on land, ice and sea. Radar can decipher features under the ice or layers within the ice itself. Longer-term monitoring from the air can be used to record the break-up of ice sheets or atmospheric changes.
Key Facts: They are known for their rugged construction, reliability and ‘Short Take Off and Landing’ (STOL) performance. Their wing span is 19.8 m and length is 15.7 m and they have a range of 1,435 km and a maximum speed of 130 knots.
ADIOS (Aircraft Deployable Ice Observation System) Sensors

Special sensors, dropped into the ice sheet from Twin Otter aircraft, will allow scientists in the Dynamic ice (iSTAR C) project to measure the speed of Pine Island Glacier and the neighbouring Thwaites Glacier as they approach the sea. Parts of these glaciers, especially near the edges, are heavily crevassed, so it is not safe for the tractor train to travel here, or for an airplane to land. Instead we will drop these sensors from an overflying Twin Otter aircraft. The Adios sensors are released down a tube and exit from the belly of the aircraft. They fall rapidly towards the ice, using a 20 cm-wide parachute to stabilise their descent. When the devices hit the surface, they are travelling at about 50 m per second (120 mph).
Key Facts: They are 2.8 m long and small fins on the side prevent them sinking too deeply so that the tail, containing its satellite communications, sticks out of the ice.

Cosmogenic isotope analysis
A complicating factor for some satellite measurements of ice sheet change is the rebound of the crust that is still occurring from the end of the ice age many thousands of years ago. We have to correct satellite measurements for this effect in order to get a robust answer for the amount of ice being lost. We do this by visiting remote rock outcrops (nunataks) and measuring how much thicker the former ice sheet used to be – this is usually delimited by a sort of geological ‘tidemark’ on the nunatak. We also need to know when the ice was that thick and so we collect samples for laboratory analysis using a technique called cosmogenic isotope surface exposure dating: this can tell us how long the rocks have been exposed out of the ice.
Global Positioning System (GPS) Receivers
A critical measure of past and ongoing ice sheet change is the rate at which the crust is rebounding. This rate is likely to be in the range from just a fraction of millimetre to one or two centimetres per year and so requires very precise measuring equipment. We will install very sensitive GPS receivers on rock outcrops and leave them for a number of years, after which we will be able to calculate a precise rebound rate. For the receivers to keep working, even through the worst of the Antarctic winter, they have to be very robust and we will install large racks of batteries and energy sources to continuously recharge those batteries. We use energy sources that can keep the GPS receivers working in both summer (solar panels) and the 24-hour darkness of the winter (small wind generators).
Ocean investigations
RRS James Clark Ross
While the tractors are chugging their way over the ice, a major science cruise will also be held on RRS James Clark Ross in early 2014. The JCR, as it is commonly called, is the UK’s main ice-strengthened research vessel. Built in 1990 and measuring 99 m long, it has been specially designed both to bring supplies to BAS’s research stations and to have the endurance and facilities to support long research cruises in ice-covered waters. The JCR can plough her way through sea ice a meter thick at a steady two knots. If she hits heavy pack ice a compressed air system rolls the ship from side to side freeing the passage.

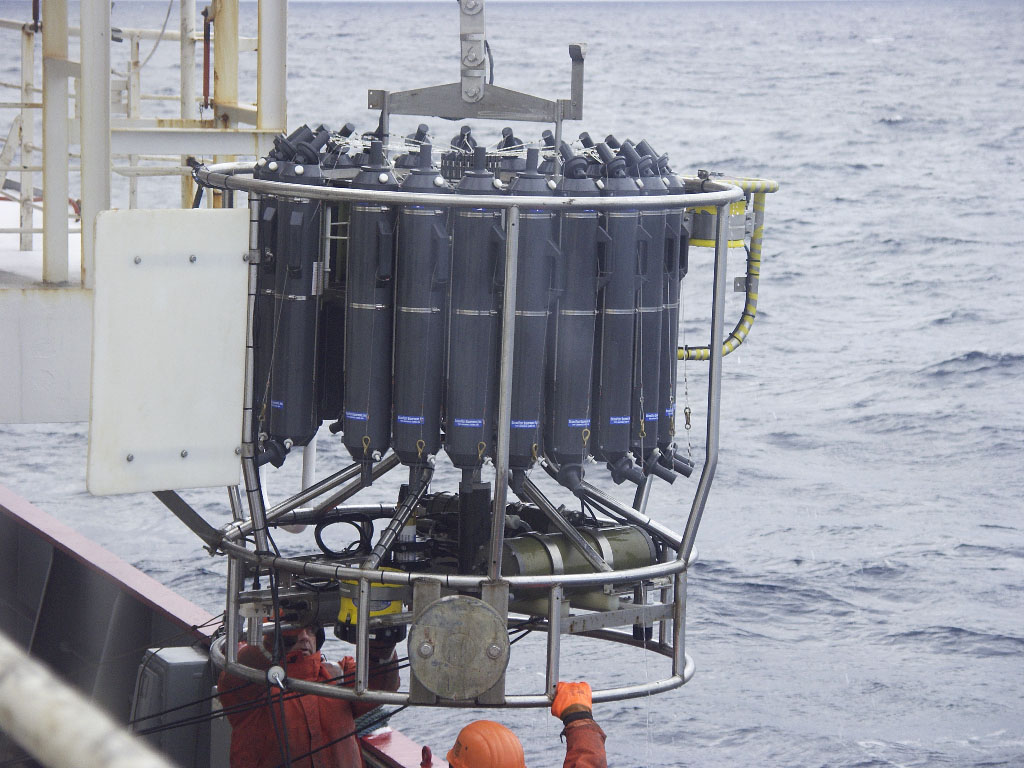
The standard instrumentation available on the ship includes multi-beam sonar, a long-range hull-mounted Acoustic Doppler Current Meter (ADCP), and a conductivity-temperature-depth (CTD) probe with additional sensors for other parameters such as dissolved oxygen, light transmission, and chlorophyll fluorescence. The CTD is mounted beneath a rosette of spring-loaded water sampling bottles, which can be triggered from the ship, capturing water samples that can be analysed on board, both to calibrate the sensors on the instrument and to measure additional parameters.
Key Facts: JCR is named after Admiral Sir James Clark Ross, R.N, while the Ernest Shackleton, originally named the MV Polar Queen, was renamed after the famous polar explorer in 1999 when she began service for British Antarctic Survey.
Seagliders
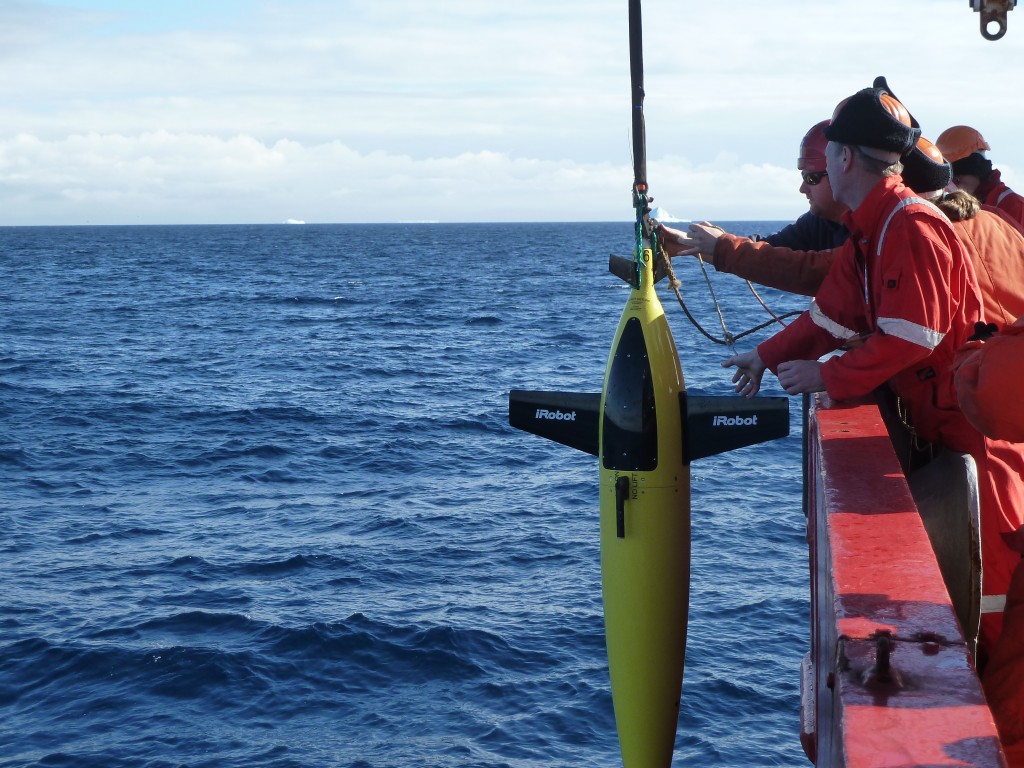
A fleet of ocean robots known as Seagliders, developed at the University of Washington and operated by the University of East Anglia, will fly through the water with extremely modest energy requirements. They are able to change buoyancy for thrust, coupled with a stable, low-drag, hydrodynamic shape. Designed to operate at depths up to 1000 m, the hull compresses as it sinks, matching the compressibility of seawater. Deployed from the JCR as part of the Oceans2ice (iSTAR A) project, the seagliders will measure temperature, saltiness as well as speed and mixing of ocean currents at different depths in the water. Each time the Seaglider reaches the ocean surface it will send back data using satellite phone technology.
Key Facts: Seagliders have a wingspan of 1 m and are 1.8 m from the top of the body to the end of the antenna and their maximum depth is around 1000 m.
Seal satellite telemetry tracking
An innovative piece of kit that allows Ocean2ice (iSTAR A) project scientists to capture information, such as the temperature and the saltiness of the water after the ship has left, requires the assistance of seals. University of St Andrews scientists from the Sea Mammal Research Unit will attach small sensors to 15 southern elephant seals. Temporarily glued to their fur, the devices will send information about the temperature and saltiness of the water that the seals dive through, as well as the seals’ movements and behaviour, back to the scientists in their laboratories by satellite.
Key Facts: The sensors will drop off when the seals moult their fur.
The moorings
Currently nine oceanographic moorings are deployed in the Amundsen Sea for iSTAR, five near the shelf break and four on the shelf, close to Pine Island Glacier. The instrumentation on the moorings consists of current meters (some single-point, some profiling), conductivity/temperature/pressure recorders, and bottom pressure recorders. They have been designed to measure the processes near the shelf break where much of the warm water flows up onto the shelf and into the troughs leading south to the ice shelves. The moorings are anchored to the seabed, mainly using scrapped railway wheels, and are held up by glass floats. At the bottom of each mooring is an acoustic release, with which can we can communicate from the ship, allowing us to pinpoint exactly where the mooring has landed on the seabed, and allowing us to give it the command to release the mooring from the anchor, so we can recover it from the ship. Most of the instruments are set up to record data for two years. At that point, the moorings will be recovered on the main iSTAR science cruise. Because of the risk of icebergs and sea ice we can’t have any surface buoys to transmit data back from the moorings in real time, so we need to get the instruments back on board in order to download the data.
Autosub
One of the aims of the science cruise is to get more information about the ice shelf cavities beneath Pine Island and Thwaites Glaciers. One useful tool to do this is the autonomous underwater vehicle (AUV) Autosub-3. Autosub is no stranger to ice shelves: during the Autosub Under Ice project in 2001-2006 the unmanned vehicle was modified for use beneath sea ice and ice shelves. This is a notoriously risky environment, and in spite of all possible precautions being taken, Autosub-2 was lost beneath Fimbul Ice Shelf in 2005. However, Autosub-3 successfully carried out a series of missions beneath Pine Island Glacier in 2009, and in 2014 we hope to obtain more data from Pine Island Glacier as well as from Thwaites Glacier.
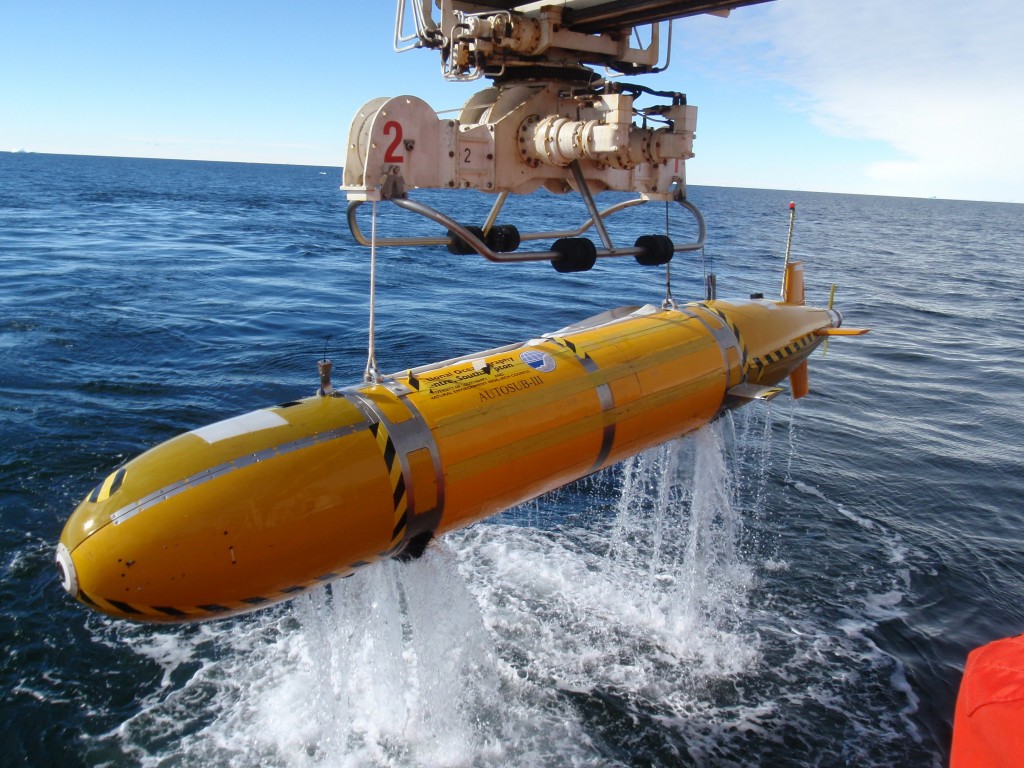
Autosub is launched and recovered from a special crane mounted on the stern of the JCR; it can be lifted from the water and retracted straight into its workshop container, where all work can be carried out in sheltered conditions.
Autosub-3 was designed, developed and built at the National Oceanography Centre in Southampton with funding from NERC. It has a maximum range of 400 km and is powered by 5000 ordinary D-cell batteries. It will be used by the Ocean under ice project (iSTAR B) to create a 3-D map of the ice above and the seabed below using a multi-beam sonar system. It also carries precision instruments for measuring the salinity, temperature, and oxygen concentrations in the sea water beneath the ice shelf, which are vital to understanding the flow of water and the rate of melting.
Key Facts: Autosub is 7 m long and weighs 3.5 tonnes. Travelling at 6 km per hour it is capable of diving up to 1,600 m deep, and can operate for 72 hours (400 km) between battery changes.
See also:
- Fact file – Pine Island Glacier
- Fact file – Ice
- Fact file – Salt in our oceans
- Fact file – Antarctica
